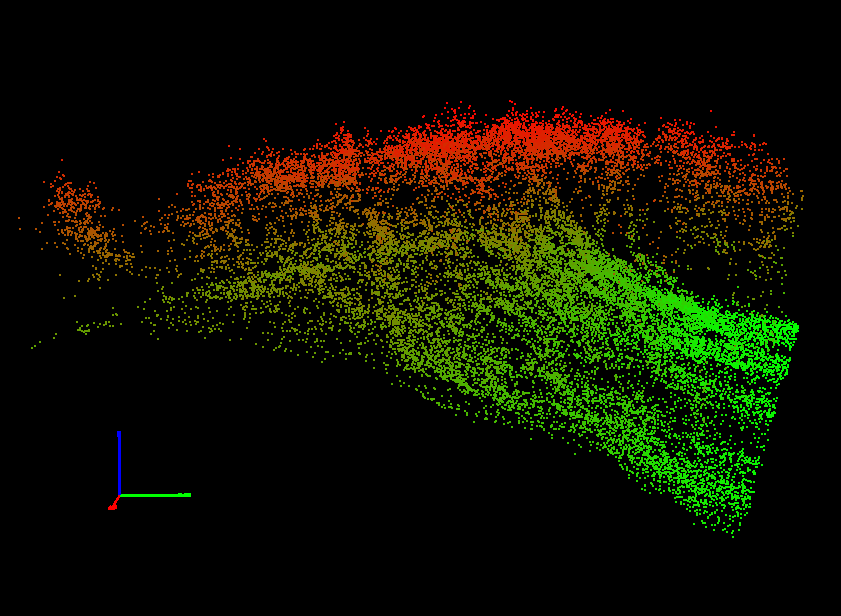
What is a point cloud?
A point cloud is a collection of three-dimensional point coordinates. The SkEyesBox generates point clouds that are representative of the environment by systematically shining a low-profile laser beam at objects and measuring the distance, based on the light's time-of-flight, to the illuminated object from a known position and orientation in space. The SkEyesBox scans the laser in a straight line that is orthogonal to the direction of travel which is sometimes referred to as the push-broom configuration. Firing the laser about 100,000 times per second, the SkEyesBox records its position and orientation as well as the angle of the mirror scanning the laser in precise (~ 1 microsecond) synchronization. Using this information, the SkEyesBox can then estimate the absolute global position of reflecting points in real time. Depending on the system configuration, the SkEyesBox also tracks the laser reflection intensity as well as the ambient color of the reflecting point in space.
Point cloud data example
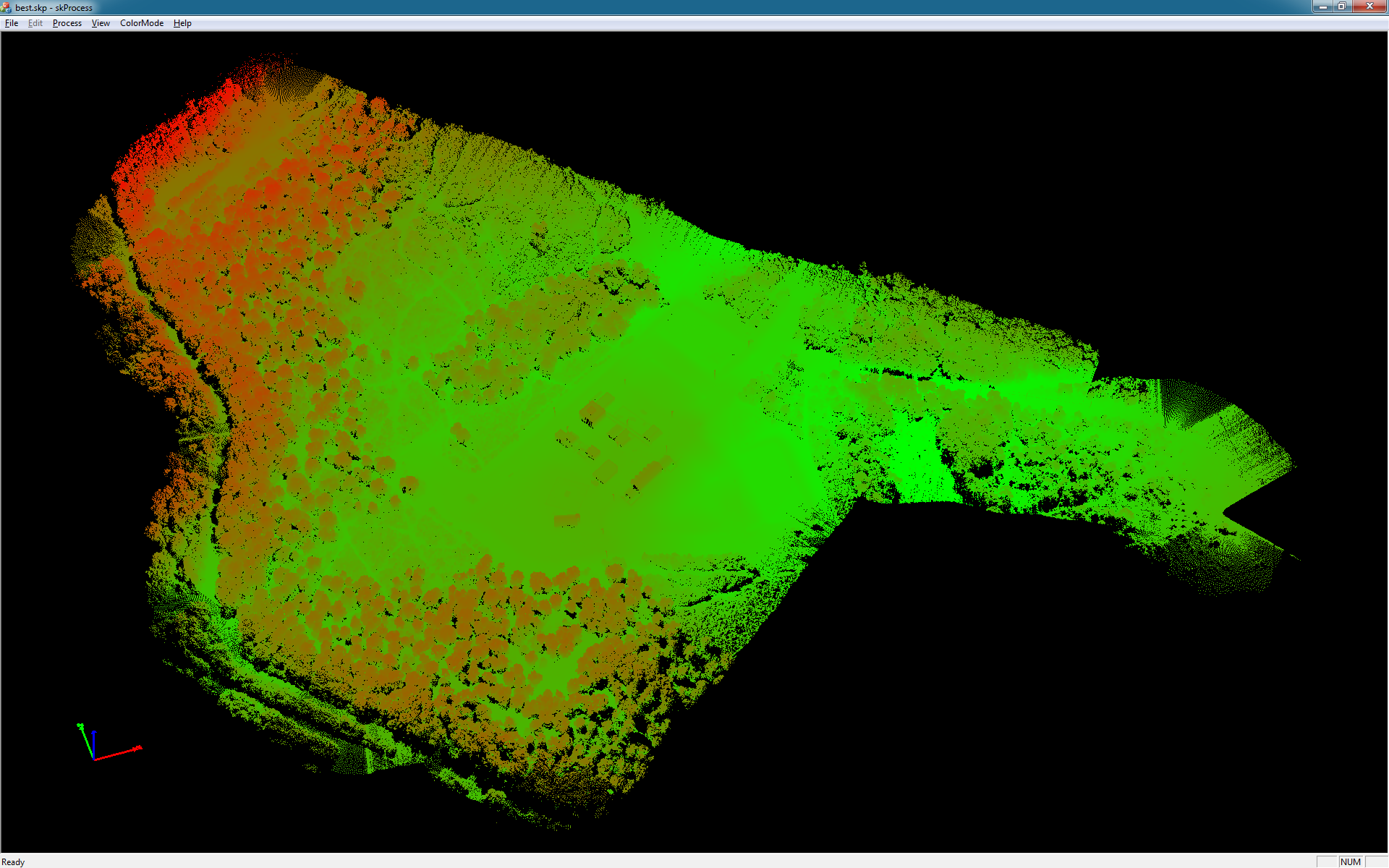
Coloring based on altitude
Higher altitude is red and lower altitude is green.
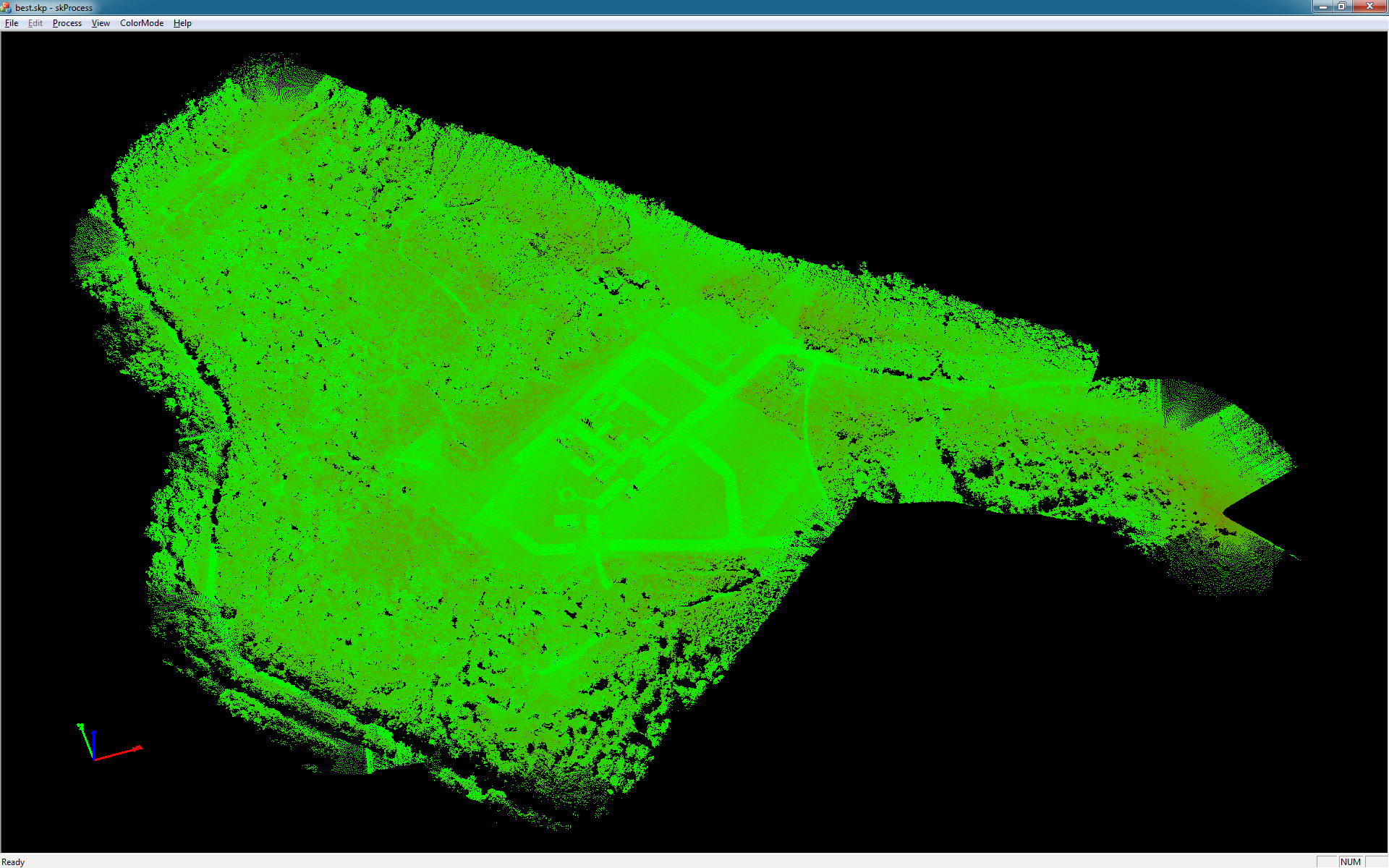
Coloring based on laser reflection intensity
High reflective intensity is red and low intensity is green. The dark asphalt road is green because of its low reflectivity.
Coloring using camera images
The reflected points are colorized using sensed color by a camera image.

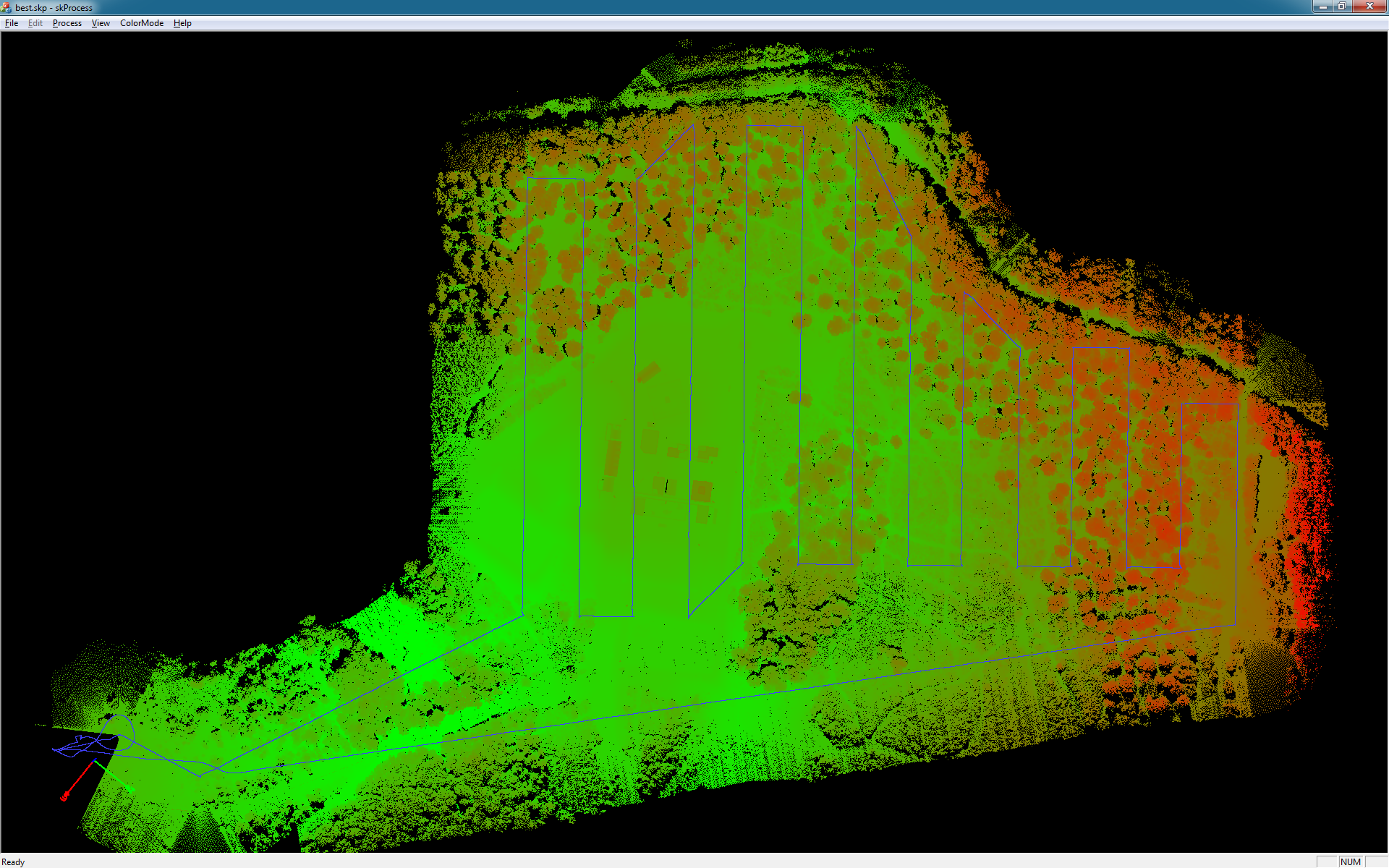
Flight Path
The blue line is the flight trajectory as flown by the SkEyesBox auto-pilot. The system maintained a 50 m distance to the ground
during the data collection flight. The horizontal position of the waypoints were selected in advance. The data collection flight
duration was 35 minutes which included the round-trip travel time to the measurement start/end point.
Pulse Mode
The SkEyesBox tracks up to 4 laser reflections as well as the last reflection for each laser sample. This allows penetration through
foliage to see the ground.